![[C++] 세 점의 각도 구하기](https://3001ssw.com/wp-content/uploads/2026/01/blog_main_banner4.png)
이번 글에서는 세 점에서 각도를 구하는 법에 대해 알아보겠습니다.
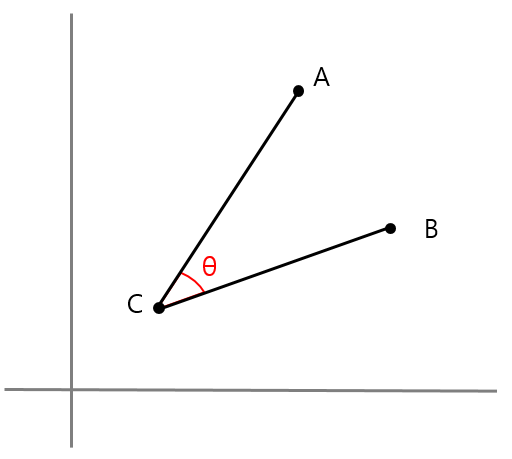
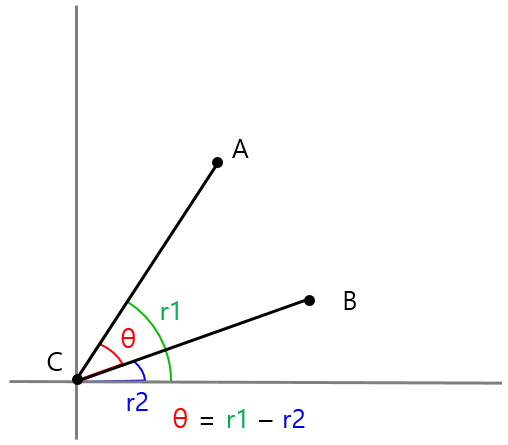
아래와 같이 세개의 점 A, B, C가 있을 때 각도θ을 구하는 방법입니다.
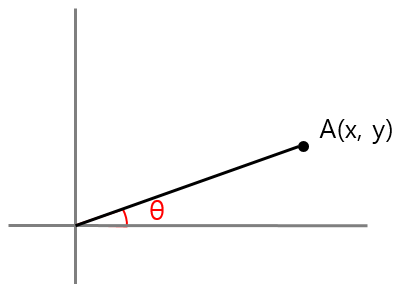
우선 각도를 구하는 방법은 tan함수를 이용하여 구할수 있습니다.
아래 그림에서 tanθ = y / x이므로 θ = atan(y / x)라는 것을 이끌어낼 수 있습니다.
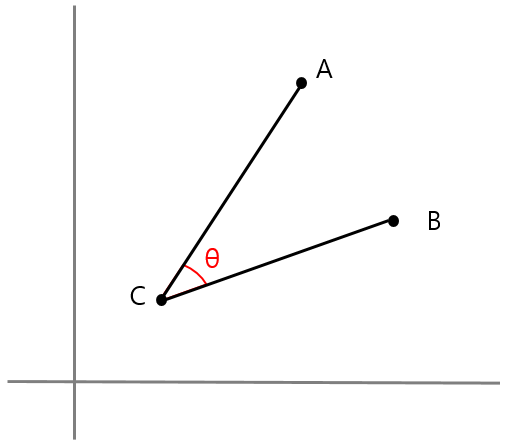
위 수식을 이용하여, 세점에서의 각도는 아래의 순서로 구할수 있습니다.
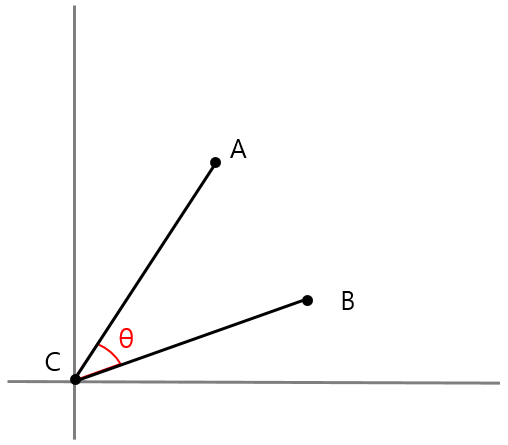
- 원점으로 이동한다.
- 직선 AC와 x축의 각도 r1을 구한다
- 직선 BC와 x축의 각도 r2를 구한다
- r1과 r2를 뺀다
이것을 코드로 아래와 같이 표현할 수 있습니다.
#include <math>
double A_X; // 점 A의 x좌표
double A_Y; // 점 A의 y좌표
double B_X; // 점 B의 x좌표
double B_Y; // 점 B의 y좌표
double C_X; // 점 C의 x좌표
double C_Y; // 점 C의 y좌표
if (!((C_X == A_X && C_Y == A_Y) || (C_X == B_X && C_Y == B_Y))) // 같은 좌표가 있으면 안된다
double dbRadian = atan((B_Y - C_Y) / (B_X - C_X)) - atan((A_Y - C_Y) / (A_X - C_X));
이렇게 얻어낸 라디안은 호도법으로 표시된 각도이므로 우리에게 익숙한 60분법으로 변환하려면 아래와 같이 180에 π를 나누고 radian을 곱해줍니다.
#define PI 3.141592
#define DEGREE_TO_RADIAN(degree) ((PI/180)*(degree)) // 60분법 -> 호도법
#define RADIAN_TO_DEGREE(radian) ((180/PI)*(radian)) // 호도법 -> 60분법
// ...
if (!((C_X == A_X && C_Y == A_Y) || (C_X == B_X && C_Y == B_Y))) // 같은 좌표가 있으면 안된다
{
double dbRadian = atan((B_Y - C_Y) / (B_X - C_X)) - atan((A_Y - C_Y) / (A_X - C_X));
double dbDegree = floor(RADIAN_TO_DEGREE(dbRadian)); // floor: 반올림 함수
}
위 코드를 활용하여 아래와 같이 프로그램을 만들어 낼 수 있습니다.
구현한 코드는 아래 코드를 다운받으면 됩니다.